Abstract
Based on an extensive review of 25 years of experiments on stone knapping and, more specifically, on the percussive activity involved, we argue that a functional framework warrants a better understanding of goal-directed action and stone knapping in particular. Based on a clear differentiation between the technique that refers to the physical mode of action on matter, and the method that refers to how the technique is used and is characterized by the spatial and temporal organization of different flaking actions, we show the necessity to develop a detailed description of the flaking behavior. The emphasis put on cognition has obscured the complexity of flaking action and, more specifically, percussive action. Based on a bottom-up perspective rooted in an ecological-dynamic framework that takes the task constraints—i.e., the conchoidal fracture mechanics—as its starting point, we show that knapping skill is grounded in the finely tuned capacity to produce the right kinetic energy required for the detachment of the desired flake, which takes years to master. Further, we show that, due to the great number of degrees of freedom of the human body, the movements performed are unique to each person. These results emphasize the critical role of the mastery of the technique and are fundamental to understanding the acquisition process of knapping skills.
Part I. Defining the problem
Acting in everyday life presupposes the capacity to perform goal-directed actions—i.e., the faculty to produce conclusive behavioral sequences that bring the actor nearer to the objective. A distinction is consequently called for between the intentional aspect of the action—i.e., the goal to be achieved—and its operational aspect—i.e., the manner in which the goal is achieved. In this context, the following questions are addressed: How to bridge the gap between the idea “I want to do a certain thing” and the behavior that will allow such realization? What are the prerequisites to succeed—i.e., what skill and “knowledge” must have been acquired to ultimately attain the goal? What does “understanding” behavior mean?
To illustrate these issues, let’s start by imagining different people engaged in everyday life activities:
“This morning the sky is clear and I decide to go for a walk, but first I want to drink a glass of water. In the apartment next to mine, Johanna plays the violin. Not far away in the dance school, Kim learns the pivot-turn. In the town of Khambhat (India), Hussein is knapping cylindrical cornelian beads, and a few kilometers further, Prabin throws large pots. In East Africa about 1.7 Myr ago, our ancestors knapped the first handaxes.”
Taken from among an almost infinite number of everyday life activities, what do these examples tell us about purposeful behavior (whether they are performed daily or occasionally, and whether they look “quite common” and “simple” or more elaborated and complex)?
When looking at a person performing any of these tasks, how do we explain the processes that take place as the desire/intention to reach a goal gives rise to the achievement of a sequence of adapted (in the case of success) actions? The examples above, which may or not involve a tool, imply a sequence of connected actions involving the body moving in space and time. In this context, how do we explain the production of purposeful behavior? To answer this question a clear description of the goal is needed to decode and interpret the behavioral sequence the actor is engaged in to be able to reach that goal. That is the purpose of this paper.
Focusing on complex real-life activities such as those described earlier, and more specifically on stone knapping, this paper sets out to show how a functional definition of the task to be achieved offers a comprehensive understanding of behavior and, consequently, an in-depth comprehension of the learning process.
The challenge of task definition
When I decide to go for a walk, to take a glass of water, to play the violin, to perform a pivot turn, or to knap a cornelian bead or a hand-axe, I will, of course, achieve a sequence of organized body movements. But is that my goal? Obviously not. In the case of walking, my goal is to go from one place to another—i.e., moving my body ahead by means of a succession of steps that alternate single and double support phases. When I take a glass of water, I want to move the glass to my mouth/lips so that I can drink. Similarly, when playing the violin, Johanna’s purpose is to produce a fine melody through the vibration of the strings. The same applies to Kim when dancing a tour pivot: although the precisely coded movement may be regarded as the focus of the dance, the aim/purpose is to make the body turn along the vertical axis. Finally, the goal of the potter is to convert a lump of clay into a specific shape, and in a similar way, the knapper’s goal is to transform a piece of rock by taking off a succession of flakes. However, these are all just descriptions of behavior; they do not explain how and why the actor succeeds in reaching the goal.
What is common to all these examples is that, whatever the task to be achieved, what causes the fulfillment of the goal is the production of forces. Each of these tasks involves the movement of different elements in play, including the actor’s body. Thus, at the level of the task and, by definition, the setting into motion of these different elements requires the production of forces specific to the task to be performed. It is because the walker produces feedforward forces that the body moves ahead. To succeed in bringing the glass toward their mouth, the drinker needs to apply a friction force on the glass of water simultaneous to a tension force for moving up the glass. To produce a sound, the violinist needs to cause the strings to vibrate through the movements of the bow; this sequence of movements is characterized by a cycle of stick and slip that involves both static (sticking) and kinetic friction (sliding) forces as the bow and the string come into contact with each other (Rasamimanana 2008). A pivot turn is characterized by the production of an angular momentum, resulting in the production of a turning motion of the body around the vertical axis (Laws 1979; Shim 2016). When considering wheel-thrown pottery, the transformation of a lump of clay into a pot depends on the combined actions of manual pressure and the kinetic energy of rotation (Gandon et al. 2016). Finally, whether it is the Indian craftsman knapping a cornelian bead or the prehistoric (or modern) knapper knapping a hand-axe, the bead or the axe will take shape thanks to a succession of percussions (elastic blows) that depend on the production of a given amount of kinetic energy at contact (between the hammer and the stone) (Bril et al. 2010).
Although different from each other, these examples have one thing in common: To succeed, the actor must produce forces that are precisely suited to the task although the immediate circumstances may impact the actual behavior of the actor. Of course, the actor will not express their behavior in terms of production of forces, and it is indisputable that the whole body sustains the production of these forces thanks to its overall movements. In this context, what are the functional parameters the actor has to regulate to produce and control these forces by means of body movements? If we go back to the examples above, to walk from one place to another, the walker must produce feedforward forces, which are created owing to the continuous alternation and control in the increase and decrease of the distance/span between the center of pressure and the center of mass (Brenière et al. 1987; Bril et al. 2015). In the case of the violinist, the essential principles relating to the production of sound can be summarized by the relationship between speed and pressure of the bow on the string (Rasamimanana 2008); below or beyond certain ratios between these two variables, the string cannot be set in vibration. To adjust the centrifugal forces the potter has to control the throwing speed of the wheel through movements that will depend on the type of wheel (electric wheel, fly-wheel, or kick-wheel) (Gandon et al. 2013). To initiate a pivot turn, the dancer must exert a torque on the floor resulting in the production of a turning motion of the body; the speed of the turn depends in part on both the amount of friction with the ground, which is controlled through the vertical impulse prior to the rotation, and the variation of inertia of the body that increases or reduces the angular momentum (Dietrich 2016; Laws 1979; Shim 2016). Let us now consider the percussive action required to produce a flake according to the conchoidal fracture: The fracture develops only if the blow is energetic enough and the amount of energy required is contingent upon the characteristics of the desired flake (Bril et al. 2010, 2012; Nonaka et al. 2010).
The intention of this long introduction on real-life examples of purposeful actions is to point out the difficulty in describing goal-directed actions in order to understand what (motor) skills mean. We will address later on through an in-depth analysis of stone knapping that regardless of the activity, different body movements allow the achievement of the same goal. Hence, following N. Bernstein (Bernstein 1967, 1996), we consider that it is not the movement per se that is the focus of the actor, but the assessment of how to satisfy the functional constraints of the task (Newell 1986; Bril et al. 2015). This critical point will be expanded in the second part of this paper.
What framework can we use to decode and explain goal-directed behavior?
To explain the transformation of an intention into a concrete episode of instrumental actions directed toward a goal, it is common among cognitive scientists to attribute behavior to an intelligent “executive function module” or executive control mechanisms (Doebel 2020; Pargeter et al. 2019; Wynn and Coolidge 2017). This theoretical framework ascribes the emergence of a coherent and well-ordered succession of actions, postures and movements to (1) some sort of mental representations, motor schemas, motor programs, motor procedures (Coolidge and Wynn 2005; Marchand 2010; Pacherie 2018; Pastra and Aloimonos 2012; Pelegrin 2005; Wynn and Coolidge 2004; among others), and to (2) action plans, motor planning, and prospective planning (Pacherie 2018; Pelegrin 2005; Putt et al. 2017; Stout and Chaminade 2012; Uomini and Meyer 2013). This prescriptive approach stipulates that the observed behavior is the result of internal models in which a principal role is attributed to a control process that is implemented in the brain. Intention triggers are supposed to activate the appropriate motor representation and planning depending on the situation, guiding and controlling the execution of the sequences of movements.
For a few decades, the development of neurosciences has enforced the belief that studying the brain will provide the keys for understanding behavior. Hence, a large number of studies focus on brain activity, considering that a better understanding of how the brain works can better explain behavior. Tool use behavior, for example, is associated with the existence of specifically assigned regions in the brain’s left hemisphere (Johnson-Frey 2004; Johnson-Frey et al. 2005; Orban and Caruana 2014; Ramayya et al. 2010; Stout and Khreisheh 2015; van Elk et al. 2014; among others). Within this neurocognitive framework, it is explicit that a causal link prevails between brain and behavior, as in Johnson-Frey’s unambiguous statement: “behaviors associated with complex tool use arise from functionally specialized networks (in the brain) involving temporal, parietal and frontal areas within the left cerebral hemisphere” (2004: 71).
However, back in real-life, the puzzle stands: How to bridge the gap between internal representations—i.e., brain activity—and overt behavior, a ‘miracle’, to allude use Kunde’s terms (2001) although this miracle is often taken for granted. But how can an “abstract representation”—regardless of its nature—be translated into the actual motor behavior? Furthermore, how can the activation of a specialized network in the brain give rise to a sequence of organized and efficient actions? What could be the exact role and function of this network regarding the for-real and tangible behaviors?
In the different examples above, what would constitute an internal model? A motor command or a motor program? What would be their functions? How would they be “selected”? Would they be essential to the performance of an action, and the guiding and control of its execution? A few years ago, J. J. Summers and J. G. Anson (2009) published an in-depth review about the notion of “motor program” and concluded that, although the concept is controversial, no one really knows what it is, nonetheless, everyone still uses it. In their detailed discussion, the authors showed that there is no consensus on what a program is, what a motor representation is, what they contain and how and where they were created. Consequently, it is legitimate to ask whether this notion should not be seen as merely metaphorical with no great explanatory power.
Indeed, the implicit assumptions behind the neuroscience model is that a detailed description of how the brain works will bring an answer to how behavior is generated. Correspondingly, this approach requires breaking the brain into the smallest cause-effect components as a necessary condition to understand a larger framework of the brain. Now, is it possible to understand the behavior of a system from its lower-level properties by only looking at lower-level properties? In a recent paper Krakauer and colleagues (2017: 481) provide an extremely clear answer: “Relaying solely on a collection of neural data, with behavior incorporated as an afterthought (and typically over-constrained) will not lead meaningful answers”. If the goal of neuroscience is to explain behavior, and not only to understand how the brain works, these authors consider that “the neural basis of behavior cannot be properly characterized without first allowing for independent detailed study of the behavior itself”1 (Krakauer et al. 2017: 488). In other words, to understand the relationship between behavior A (the brain) and behavior B (actual behavior of a person or animal), it is absolutely necessary to study both with equal details. But the literature shows that while the development of neuroscience is skyrocketing, behavioral research still lacks in-depth development (Krakauer et al. 2017).
The present paper is framed in light of these observations. Our aim is to provide a theoretical framework for describing goal-directed behavior in order to better understand what is meant by expertise and learning. Indeed, too often action is equated with movement; movements being considered as the building blocks of action. We consider here that it is important not to confuse these two notions. Based on N. Bernstein research on the physiology of movement (1967, 1996), we consider that functional actions are primary, while control of movements and postures are secondary. Movements are not the building blocks of action; instead, the control of movements is one of the results of the development of action, (Bernstein 1996; Reed and Bril 1996). Indeed, Bernstein states the following: the control that guides the movement “cares only about how the movement fits the external, alien space outside the body. It does not care much about the biomechanical side of the movement, how joint angles will change […]. It knows one thing: there is enough degrees of freedom in an arm to place the wrist into any point of accessible space and by many paths. It is none of its business how joint angles actually group to reach the goal” (1996: 138). The end of a movement is not the movement per se, but the goal it allows to reach; movements exist to serve the purpose of the task. The crux of motor skill is not to learn to move the body, but to solve motor problems (Bernstein 1996: 146, 181). The detailed analysis of stone knapping developed in the next part of this paper will emphasize this theoretical point of view.
A functional perspective rooted in an Ecological-dynamics framework
Adaptive behavior entails continuous interaction between the organism and the environment (Chiel and Beer 1997; Heft 2001; Järvilehto 1998, 2006; Reed 1996). The ecological-dynamical framework—the fusion of ecological psychology and the dynamical system theory approach to the study of human behavior (Renshaw and Davids 2014)—emphasizes this point. From this perspective, understanding behavior cannot be reduced to either cognitive or biomechanical capacities of the organism alone. Adaptive behavior is an expression of the functional coupling between the organism (as a whole) and the environment. Such a perspective is based on the idea that the optimal unit of observation is that of one system: the organism/environment system (Gibson 1979; Mace 1977; Reed 1996; Smitsman 1997; St Amant and Horton 2008). The behavior underlying the fulfilment of a goal-directed action is then best viewed as emergent from the state of all the elements involved, and depends on the history of each of these elements over a mechanism of self-organization (Higgins 1985; Järvilehto 2006; Newell 1996; Reed 1988; Thelen and Smith 1996).
Referring to the constraints theory of K. Newell (Bingham 1988; Newell 1986, 1996), we consider that the system under study (organism/environment) is grounded in three sources of constraints which combine to provide the boundary conditions for carrying out an action: the organism, the task at hand, and the environment (Newell 1996). The organism encompasses the physiological, biomechanical, neurological, cognitive, and even affective aspects of the organism, whether it is an animal or a human. The task characteristics refer to its functional properties—i.e., what the actor has to do to successfully attain the goal. This point will be discussed more thoroughly in the second part of this paper through the specific case of stone knapping behavior. The environment comprises the universal constraints experienced by the organism (such as gravity or temperature), and more local characteristics (such as the availability of tools). Regardless of the domain of behavior being studied, action is regarded as an emergent property of the interaction between these three sets of constraints depending on ongoing conditions. Ongoing internal conditions refer to the actual state of the organism—i.e., tiredness or the need to continue the activity over a long period of time. External factors refer to cultural or institutional constraints (Bril 2018). This being said, any study about action control cannot be grasped if these different kinds of constraints, and the dynamics of their interaction, are not at the heart of the analysis (Warren 2006).
How to deal with a sequence of purposeful actions in goal-directed behavior? The different levels of goal-directed action
When engaged in a task, we have seen the necessity to differentiate the goal—i.e., what to do—from the means—i.e., how to do it. To account for the behavioral course of actions, it is usual to breakdown the temporal sequence into smaller segments or units (Buchsbaum et al. 2015; Endress and Wood 2011). To address the dynamics of the activity, three concepts initially developed in anthropology and archaeology appear suitable to fully describe and analyze the course of actions: the chaîne opératoire, the technique, and the method.
The chaîne opératoire originated in Leroi-Gourhan’s work on “material culture” (Leroi-Gourhan 1964). It provides a framework for a systematic description of the processes involved in a technical activity. It has been applied to a broad spectrum of craft past and present contexts. It aims at describing the succession of phases involved in a technical process, mentioning actors and material, as well as the environmental and the social context in which the process takes place (Cresswell 2010; Lemonnier 1986).
The technique refers to the physical modalities according to which the action is performed. In the case of lithic production, the technique refers to the production of a conchoidal fracture that is initiated at a point, which depends on the momentum delivered at the time of contact (Bril et al. 2009, 2012; Dibble and Pelcin 1995; Pelegrin 2005). This applies irrespective of the knapping technique considered. Hence, the technique corresponds to the minimal unit of functional action on the environment and refers to the physical mode of action. It cannot be split into smaller functional segments.
Finally, to reach the goal, a sequence of interrelated actions must be carried out, involving one or more techniques; this sequence of actions to produce the desired outcome is regarded as the method (Inizan et al. 1999). In other words, the method refers to how the technique(s) is/are operated to reach the goal. In fine, the course of actions when reaching a goal can be described as the actualization of one or several techniques depending on the method considered. As such, techniques and methods, when operationalized, generate a potentially very large range of effective behaviors. This point will be developed in more detail in the second part.
This perspective, which emphasizes the nature of action while focusing on the goal, assumes the technique to be the crux of any goal-directed action; the method, conveying its place in the whole process toward reaching the goal. In other words, the method acts as a guide and is regarded as the knowledge necessary to go through the different needed subgoals.
Based on the case of stone knapping, the second part of this paper presents a full instance of how to implement and practice this approach, and debates its relevance for understanding expert behavior and, ultimately, learning.
Part II. From “goal” to “actions” to “movements”: The case of stone knapping
To illustrate the framework proposed here in order to better understand goal-directed behavior, the following sections present a general view of the results of two series of experiments completed over a period of more than 25 years. A first series of field experiments were initiated almost three decades ago in India and focused on knapping skills and learning in different groups of craftsmen. The whole knapping process was recorded and analyzed. At the time they were conducted, these experiments were considered groundbreaking, as instrumented hammers as well as sensors to record the movement of the hammer and the knappers’ upper limbs were used. The results suggested that knapping skills are grounded in a full mastery of the technique that takes years to acquire (Biryukova and Bril 2008; Bril et al. 2005, 2012; Roux et al. 1995). These results launched a second set of experiments focusing more extensively on the percussive action itself: the technique.
Although the two knapping techniques under study (indirect percussion by counter blow with soft hammer and direct percussion with hard hammer) are very different, we considered well founded the comparison between the two to understand knapping behavior. Indeed, regardless of the technique, what must be controlled are the parameters of the conchoidal fracture, which are, in both cases, the same.
Cornelian bead knapping by Indian craftsmen
One of the few places2 in the world where stone knapping is still practiced is in Khambhat, India, within the bead industry3 (Roux 2000; Bril et al. 2005); the technique used to make beads of different shapes being an indirect percussion by counterblow (Pelegrin 1994, 2005; see Fig. 1).

The original aim of the work was to understand why it takes 10 years to become a good knapper. More precisely, our ambition was to tentatively disentangle the different dimensions of expertise—i.e., the underlying abilities, the controlled factors, and the skills and knowledge. With this aim in mind, we set up “field experimentations” that consisted of (1) working with craftsmen in a situation as close as possible to their everyday activity, and (2) using recording devices as similar as possible to those in a laboratory setting. Field experiments provide the opportunity to work on real life behaviors with maximum control. They allow for analysis of parameters usually studied in laboratory experimental situations.4
Craftsmen of different levels of expertise participated in the experiments. With bead knapping being a two-step process, the experiments focused on each of these stages—i.e., from the raw material to the roughout and from the roughout to the preform. The objective of the initial experiments was to work on the knowledge of the method in relation to the features of the end product—i.e., roughout or preform—as well as the characteristics of the stroke (the percussion)—i.e., the mastering of the technique. With regard to the first stage of knapping a bead—i.e., from cobble to roughout— craftsmen of different levels of expertise had to produce two types of roughouts from selected pebbles. The entire manufacturing process of each bead was videorecorded (Roux and David 2005). A detailed analysis of the course of actions, namely, the succession of actions carried out with regard to the goal to be reached, was performed5. A second set of experiments dealt with the relationship between the mastery of the technique and that of the method, allowing a simultaneous analysis of the course of actions (the method), the percussive movements (the technique), and the resulting product (the bead). Craftsmen were asked to knap different preforms from roughouts of different shapes and different raw materials (cornelian and glass), with different hammers. The knapping sequences were also videorecorded: the hammer head movement was recorded with an accelerometer, while the arm movement was recorded with electromagnetic devices (Biryukova and Bril 2008, 2016; Bril et al. 2000, 2005; Roux et al. 1995).
In both sets of experiments, the analysis of the course of actions very seldom disclosed any errors in the sequencing of the subgoals, regardless of the level of expertise of the craftsmen, which means that they all “knew” the methods. On the other hand, a look at the pieces immediately revealed their difference in skills (Bril et al. 2005; Roux and David 2005; Roux et al. 1995). All the craftsmen could produce a coherent “plan of actions”—i.e., they had a good awareness of the method (Roux and David 2005; Roux et al. 1995). Variance emerged at the level of the removing of flakes—i.e., at the level of the technique. For almost all the craftsmen, the methods appeared as guidelines for acting. However, depending on the skill level, flaking mistakes, although rare among experts, were dealt with differently. After a failed removal, an expert would produce a rejuvenation operation, whereas a less expert craftsman would keep repeating the same flaw; the former would, thus, positively modify the situation, contrary to the latter.
In other words, the results obtained showed that the methods correspond to memorized master plans, which constitute a guide toward the goal. While pre-existing the action, the knowledge of the method is in no way sufficient for the craftsman to act effectively. It is possible to know the method and be unable to implement it if the percussive action (technique) is not well mastered.
The other important result of these experiments concerns the percussive action itself and consequently the concomitant hammer and body movements. The results showed that, irrespective of the level of expertise, important differences in postural preferences and movement profiles could be observed both on intraindividual and interindividual bases (Biryukova and Bril 2008; Biryukova et al. 2005; Bril et al. 2005; Roux et al. 1995). These results are of particular significance in explaining expertise and, subsequently, learning. To address this issue in more detail, new sets of experiments focusing on the percussive action (the technique) were completed with experimental archaeologists of different levels of expertise. In this new set of experiments, the technique under study was direct percussion with a hard hammer.
3 Bead knapping is a male-only activity. Young women and children work on small leftover pieces from knappers to make small irregular ones by splitting them up.
4 The results of these experiments are shown in the following papers: Biryukova and Bril 2008; Biryukova et al. 2015; Bril et al. 2005, 2010; Nonaka and Bril 2012, 2014; Roux 2000; Roux et al. 1995.
5 To this end the sequences of actions were described and coded owing to computer software used in ergonomics for behavioral time series analysis (for more details, see Roux and David 2005, Bril et al. 2000, 2005).
The technique: the key to expertise
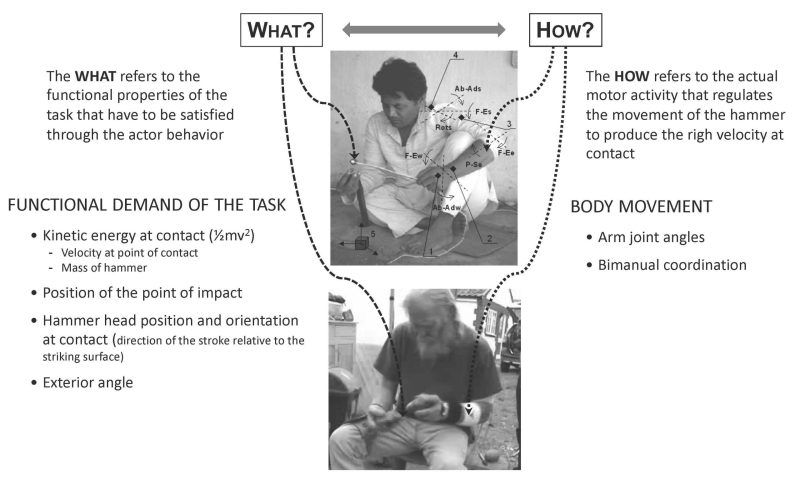
As we have seen, a percussive task involves delivering a blow or a series of blows over an object with another object, typically held in the hand. This definition may be applied to any percussive activities. However, as already mentioned, this is only a description of the behavior that gives no explanation of why it is efficient. When working on goal-directed actions, the aim is to better understand the relationship of the three dimensions: What is the purpose of the action? What must be done? How must it be done? (Bernstein 1996: 234). Consequently, it can be noteworthy to differentiate the WHAT of the action from the HOW (see Fig. 2). The WHAT relates to the functional properties of the task that have to be satisfied through the actor’s behavior; more precisely, it refers to the relationship between the hammer and the stone. The HOW refers to the actual motor activity of the knapper that regulates the movement of the hammer to produce the right velocity at contact; in other words, the HOW looks at the body and arm kinematics in terms of posture, joint angles variations, and bimanual coordination.
A set of experiments (Nonaka et al 2010; Rein et al. 2013, 2014; Parry et al. 2014) was designed to better understand the relationship between the WHAT and the HOW. In other words, the aim of these experiments was to understand the relationship between the three dimensions of a goal-directed action at the level of the technique: (1) the purpose (to take off a flake characterized by specific shape and dimensions), (2) the WHAT (to produce the right kinetic energy at contact) and (3) the HOW (to perform a multijointed arm movement that will move the head of the hammer in such a manner that it will produce the right amount of kinetic energy at contact).
Being an expert means fine-tuning of the functional parameters
Based on the assumption that the expert is the one who is able to adaptively succeed regardless of the constraints on the knapping task (Bril et al. 2000, 2005; Roux and David 2005; Roux et al. 1995), different experiments explored the knappers’ flake production and movements performed in both free and constrained situations. Across experiments, in which task constraints varied (mass of the hammer and size of the flake to be removed), the results showed that, while all participants modified their behavior, the success rate was systematically higher for experts, with novices being hardly able to produce flakes of significantly different sizes when instructed to (Bril et al. 2010). When the size of the flakes to be produced was not imposed, experts produced flakes systematically larger than those produced by participants with less experience (Bril et al. 2010; Nonaka et al. 2010). When using hammers of different masses, only experts were able to hold constant kinetic energy for a given flake size, a condition that enforces the adjustment of the velocity vector to the demand of the task (Biryukova and Bril 2008; Bril et al. 2010). Moreover, experts used consistently smaller kinetic energy, regardless of the conditions (producing large or small flakes, using light or heavy hammers). Since the kinetic energy produced by novices and intermediate knappers was systematically greater than that which was needed (up to four times or even more for novices), this suggests that only experts were aware of the existence of a threshold mechanism underlying conchoidal fracturing (Bril et al. 2010). These results clearly suggest that the degree of attunement of kinetic energy to the task demand can be seen as a direct indicator of the knappers’ skill level.
These results confirm that when knappers were queried about the flake they intended to produce6, only high-level experts were able to produce a flake close to what they predicted in terms of dimensions, length, width, and position of the point of percussion. In addition—and this is critical—only experts generated a value of kinetic energy correlated with the dimensions of the predicted flake (Nonaka et al. 2010).
These results indicate that one reason why the outcome of the flaking process does not always meet the desired goal is due to the inability to produce a succession of flaking that meets the requirements of the predicted shape.
From action to movement
We have seen that in knapping, the velocity of the hammer has to be controlled to produce the required kinetic energy in relation to the mass of the hammer. As the functional parameters are imposed by the knapping task, once the hammer mass has been chosen, its velocity becomes the ultimate functional parameter to be controlled. However, it may be regulated through various strategies since, for a biological system, the efficiency of a blow can be defined in terms of potential and kinetic energy. The actor may rely on a large potential energy that corresponds to a wide range of the vertical component of the trajectory of the hammer. On the other hand, to reach the same velocity, a small amplitude of the trajectory will require additional muscular energy. Indeed, due to the great number of degrees of freedom of the human body, there is an infinite number of ways to produce a given value of kinetic energy. Hence a greater flexibility can be achieved by concurrently changing the trajectory of the hammer, the amplitude of the movement and the muscular force. This explains why large variations in movement are observed both within and between individuals.
The observed variability of strategy in body movements is sustained by the multiple degrees of freedom of the body at the level of joints and muscles (Bernstein 1996; Biryukova and Bril 2002; Latash 2012). Indeed, important differences are observed in postural preference and movement profiles both on intraindividual and interindividual bases (Biryukova and Bril 2008; Biryukova et al. 2015; Parry et al. 2014; Rein et al. 2014). For example, when examining a strike (a percussive movement), the initial and final arm positions, as well as the range of motion of joint angles of the wrist and the elbow, vary from one individual to another, again, irrespective of the level of expertise. These results support the hypothesis of individual motor solution to a common motor problem (Rein et al. 2014); each individual builds up favored personal motor patterns depending on the individual experience and anatomical configuration.
If no clear-cut difference of movement kinematics explains the recognized level of expertise, what characterizes skilled movement in stone knapping? What element in the knapper’s movement makes the difference? An analysis of the relationship between the hammer movement and the kinematic chain of the arm makes it possible to study the arm movement strategy (dynamics of the joints movements) in relation to the movement of the hammer (functional parameters) (see Scholz and Shöner 1999)7. It is then possible to differentiate in the distinctive joint movements those that detrimentally affect the movement of the hammer (task performance)—i.e., the components that alter the performance, the “bad” variations—from the joint movements that have no influence on the hammer movement—i.e., those that do not affect the functional trajectory of the hammer, the “good” variations. In other words, this kind of computation studies the kinematic chain (of the arm) in terms of the contribution of the joints that produce, or not, a deviation of stroke execution from functionality. This method has been applied to both knapping techniques (indirect percussion by counterblow and direct percussion) and shows that for both cases, regardless of the skill level, the fluctuation of the arm joint configuration that leaves the performance constant—i.e., that does not affect the position of the hammer—is greater than the fluctuations that affect the position of the hammer. Furthermore, for both techniques, expert knappers display significantly smaller variability (good and bad) than less skilled knappers (Biryukova et al. 2015; Rein et al. 2013).
Thus, while movement kinematics of the arm appears to be specific to each individual knapper, optimizing the trajectory of the hammer appears to be an important performance variable in stone knapping skill.
Stone knapping, a bimanual activity
If percussive movement per se is a unimanual movement, the bimanual nature of flaking is part of its complexity. Indeed, the control of the percussive hand is unmistakably rooted in that of a bimanual system—i.e., each hand is engaged in qualitatively differentiated roles—while cooperating with each other to achieve an overall goal (Nonaka and Bril 2012). Addressing this question is important as the non-striking hand’s role—the supporting hand—is not only used to stabilize the core, but also to provide the appropriate relative orientation of the core so that the striking location and angle of strike can be reached. An analysis of bimanual activity has been performed for the technique of percussion by counter blow in the production of carnelian beads, based on recurrent methods of analysis8, with craftsmen of different levels making beads out of two different raw materials (carnelian and glass) (Nonaka and Bril 2012). Evidence was found that the movements of the two hands were functionally linked, reflecting the roles assumed by each hand. However, the dynamics of bimanual movement exhibited more stable and deterministic coupling with high level experts, although, at the same time, their hammering arm movements showed greater variability in amplitude and frequency (Biryukova and Bril 2008; Nonaka and Bril 2012). This apparent inconsistency suggests that the observed deterministic structure of the bimanual dynamics does not stem from the stereotypy of the hammering arm movement. Furthermore, the bimanual coordination is embedded in the context of the task function. In other words, more so for high level experts, the dynamics of bimanual coordination reflect the functional demands of the task—i.e., type of subgoal (see Fig. 1)—with the dynamics of bimanual coordination being more stable and less noisy for more demanding tasks (Nonaka and Bril 2012). In short, it can be hypothesized that, although the two arms have quite different functions, with increasing levels of skill they become more and more functionally linked, thus, reducing the number of parameters to be controlled (Biryukova and Bril 2008, Jäncke 2006).
A functional model
A summary of the functional approach to the knapping technique reviewed in the present paper is presented in Figure 3. This model is grounded in the mechanical constraints of the conchoidal fracture. These constraints are imposed on knapping behavior and prompt the knapper’s behavior. In other words, the conchoidal fracture mechanics dictate the behavior of the knapper, whether a human or a robot! Knapping skill or flaking skill—more restrictively here as the technique is considered—may be defined as the capacity to respond as satisfactorily as possible to the goal the actor is engaged in, regardless of the conditions—i.e., producing a flake with the desired characteristics in terms of size, thickness, raw material and environmental conditions—so as to fully participate in the sequence of flaking defined by the overall goal of the knapper.
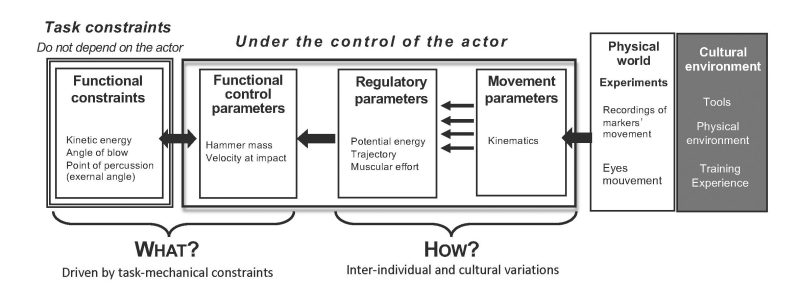
The knapping behavior is presented under the three levels discussed earlier: (1) the functional or control parameters, (2) the parameters of strategy, and (3) the movement parameters. While the functional or control parameters (the WHAT) are imposed by the task (the kind of flake to be produced), the parameters of strategy of action and strategy of movement (the HOW) vary importantly among knappers. From a methodological point of view, it is important here to remember that only the motion of material objects can be directly recorded. Hence, the different parameters defining the knapper’s motor behavior will be computed from the recording of a few specific parts of the body and the tool (the hammer) based on a model of the body. The chosen model of the body will depend on the intended focus of the analysis; although being a biomechanical issue, this has to be carefully considered (Biryukova et al. 2000; Hogan 1985).
While the present discussion is restricted to the motor behavior, it has to be completed by an analysis of the different sensory means (visual, proprioceptive, kinesthetic, tactile, and even vestibular), which are necessary to inform the actor about the state of the whole system. Throughout his work, Bernstein (1967, 1996) continuously refers to the importance of sensory information, necessary to insure the control of motor action—this issue falls beyond the present discussion and needs further development. However, this functional model offers an efficient way to describe goal-directed behavior by differentiating behavioral organizational levels.
Conclusion: The need to differentiate technique from method for understanding stone knapping skills
Reviewing a series of experimentations on stone knapping behavior developed over 25 years, this paper reveals how a well-designed description of behavior, based on the functionality of action, supports a better understanding of skilled goal-directed behavior. We argue here that distinguishing the functional constraints exclusive to the task and the multiple potential ways to behaviorally satisfy these constraints allows for a better understanding of knapping skills and learning. In other words, once the goal is specified, these functional constraints are given and must be fulfilled, as long as different ways to solve the task exist.
Indeed, in the knapping literature, a lack of “well developed models of technical cognition” (Wynn and Coolidge 2017) or technical thinking (Malafouris 2021) is often mentioned and unfolds in questionings such as: “How do the knapper’s intention, perception and action relate?” or “Where does the ‘thinking’ stop and the ‘flaking’ begin?” (Malafouris, 2021: 107-108). Assuming that these issues are relevant, I suggest that these questions cannot be answered without a functional description of the task. It is often assumed that “technical thinking” is based on various cognitive components often referred to as haptic perception, spatial cognition, long term or working memory, semantic knowledge, etc. (Wynn and Coolidge 2017). Nevertheless, these are not specific to stone knapping.
Most of the time, studies about stone knapping skills are based on the distinction between the cognitive and the sensori-motor dimensions—the emphasis being on the cognitive component (Pargeter et al. 2020). This is especially noticeable when considering the long-accepted distinction between “abstract knowledge” (connaissance) and practical know-how (savoir-faire), introduced long ago by J. Pelegrin (1991, 2005)—with the sensori-motor component receiving much less interest, being often considered a “biomechanical question”, a quite basic action involving little cognition. However, quite recently, Pargeter et al. (2020) restated the importance of understanding motor coordination and control over knapping.
Indeed, the missing part of most studies could well be the absence of in-depth descriptions of what knapping is and, more specifically, what flaking stands for. Whereas the mechanical principles of the conchoidal fracture have been well defined (Dibble 1997; Dibble et al. 1995; Li et al. 2022; Pelegrin 2005), the knapping activity in terms of “behavior” has not been considered in depth. In particular, the manner in which the knapper handles the mechanical properties of the conchoidal fracture needs to be addressed in greater depth (Li et al. 2022).
In this review, I hope to have substantiated the benefit to clearly differentiate the method from the technique. The technique, referring to the physical modalities of the production of a flake, appears as the minimal unit of action. While it is usually accepted that “Oldowan-level flaking proficiency can be achieved by modern knappers within just a few hours of practice” (Pargeter et al. 2020: 4), the results discussed in this review show that a task such as flaking, usually presented as simple and unelaborated, is of substantial complexity. A fine mastery of flaking requires years of practice, which turns out to be the prerequisite for successful implementation of the method.
Our approach to goal-directed action may be qualified as “bottom up” as opposed to the long lasting “top-down” mainstream view, which attributes the brain as the major controller of action (Biryukova and Sirotkina 2020). It is assumed that the mechanical requirements necessary to produce a conchoidal fracture impose on the actor the production of the adequate quantity of energy (kinetic energy at contact) that yields a well-defined flake. On the basis of these assumptions, it is assumed that what has to be learned is not a movement but the capacity to finely tune this kinetic energy, that is, to rightly choose the weight of the hammer and produce the right velocity vector at the point of impact of the hammer on the stone.
Due to the huge number of degrees of freedom of the human organism (Bernstein 1967, 1996; Latash 2012), understanding behavior is no easy task. Indeed, many ways are possible to reach a goal. The present review has shown that this is the case at the behavioral level, the movement being specific to each knapper. Furthermore, as Krakauer and colleagues stress in their paper titled “Neuroscience needs behavior” (2017), this is the case as well when considering the neural level where multiple possible patterns of activity may engender a single natural behavior. Conversely, a single pattern of brain activity can map with multiple natural behaviors. In a similar way, resulting movements can be achieved by different muscle coordination patterns (Bernstein 1967).
As underlined by Krakauer and colleagues in their plea to enlarge in-depth studies of behavior, “the neural basis of behavior cannot be properly characterized without first allowing for independent detailed study of the behavior itself” (2017: 488). I hope that the studies on stone knapping reviewed here provide a good illustration of the critical importance of developing conceptual frameworks based on “bottom-up” models (Biryukova and Sirotkina 2020) for understanding complex real-life behavior.
Acknowledgments
I am very grateful to the organizers of the Sixth annual DFG Center Symposium “Biocultural Implications: an agenda for integrative approaches” for inviting me and giving me the possibility to deliver a talk reviewing 25 years of an interdisciplinary research on stone knapping skills. My special thanks go to Alexandros Karakostis for his invaluable help and advice, and to two anonymous reviewers, whose constructive comments have helped improve the clarity and writing of the text. I would also like to express my thanks to John Onians and an anonymous corrector for their help in editing and improving the use of English in this chapter’s text.
References
Bernstein, N. A. 1967. The coordination and regulation of movements. New York: Pergamon Press.
Bernstein, N. A. 1996. On Dexterity and its Development. In Dexterity and its Development, ed. by M. L. Latash and M. T. Turvey, pp.1–235. Mahwah (NJ): Lawrence Erlbaum Associates.
Bingham, G. P. 1988. Task-Specific Devices and the Perceptual Bottleneck. Human Movement Science 7(2-4): 225–264. DOI: 10.1016/0167-9457(88)90013-9.
Biryukova, E. V., A. Roby-Brami, A. A. Frolov, and M. Mokhtari. 2000. Kinematics of human arm reconstructed from spatial tracking system recordings. Journal of Biomechanics 33: 985 995. DOI: 10.1016/S0021-9290(00)00040-3
Biryukova E.V., and B. Bril. 2002. Bernstein et le geste technique. In Le geste technique. Réflexions méthodologiques et anthropologiques, ed. by B. Bril and V. Roux, pp. 49–68. Ramonville Saint-Agne: Éditions Érès.
Biryukova E.V., B. Bril, G. Dietrich, A. Roby-Brami, M.A. Kulikov, and P.E. Molchanov. 2005. The organization of arm kinetic synergies: the case of stone bead knapping in Khambhat. In Stone knapping: the necessary conditions for a uniquely hominin behaviour, ed. by V. Roux and B. Bril, pp. 73–90. Cambridge: MacDonald Institute for Archaeological Research.
Biryukova, E.V., and B. Bril. 2008. Organization of Goal-Directed Action at a High Level of Motor Skill: The Case of Stone Knapping in India. Motor Control 12(3): 181–209. DOI: 10.1123/mcj.12.3.181.
Biryukova, E.V., and I. Sirotkina. 2020. Forward to Bernstein: movement complexity as a new frontier. Frontiers in Neuroscience 14: 553. DOI: 10.3389/fnins.2020.00553.
Biryukova, E.V., B. Bril, A. Frolov, and M. A. Koulikov. 2015. Movement Kinematics as an Index of the Level of Motor Skill: The Case of Indian Craftsmen Stone Knapping. Motor Control 19(1): 34–59. DOI: 10.1123/mc.2013-0042.
Brenière, Y, M.C. Do, and S. Bouisset. 1987. Are dynamic phenomena prior to stepping essential to walking? Journal of Motor Behavior 19: 62–76.
Bril, B. 2018. Action, Movement, and Culture: Does Culture Shape Movement? Kinesiology Review 7: 79–87. DOI: 10.1123/kr.2017-0060.
Bril B., V. Roux, and G. Dietrich. 2000. Habiletés impliquées dans la taille des perles en calcédoine : caractéristiques motrices et cognitives d’une action située complexe. In Cornaline de l’Inde. Des pratiques techniques de Cambay aux techno-systèmes de l’Indus, ed. by V. Roux, pp. 207–332. Paris : Éditions de la Maison des Sciences de l’Homme.
Bril, B., V. Roux, and G. Dietrich. 2005. Stone Knapping: Khambhat (India), a Unique Opportunity? In Stone Knapping: The Necessary Conditions for a Uniquely Hominid Behavior, ed. by Valentine Roux and Blandine Bril, pp. 95–118. Cambridge: McDonald Press.
Bril, B., G. Dietrich, J. Foucart, F. Koki, and S. Hirata. 2009. Tool Use as a Way to Assess Cognition: How Do Captive Chimpanzees Handle the Weight of the Hammer When Cracking a Nut? Animal Cognition 12(2): 217–235. DOI: 10.1007/s10071-008-0184-x.
Bril, B., R. Rein, T. Nonaka, F. Wenban-Smith, and G. Dietrich. 2010. The Role of Expertise in Tool Use: Skill Differences in Functional Action Adaptations to Task Constraints. Journal of Experimental Psychology: Human Perception and Performance 36(4): 825–839. DOI: 10.1037/a0018171.
Bril, B., J. Smaers, J. Steele, R. Rein, T. Nonaka, G. Dietrich, E.V. Biryukova, S. Hirata, and V. Roux. 2012. Functional Mastery of Percussive Technology in Nut-Cracking and Stone-Flaking Actions: Experimental Comparison and Implications for the Evolution of the Human Brain. Philosophical Transactions of the Royal Society B: Biological Sciences 367(1585): 59–74.
Bril, B., L. Dupuy, G. Dietrich, and D. Corbetta. 2015. Learning to tune the anteroposterior propulsive forces during walking: a necessary skill for mastering upright locomotion in toddlers. Experimental Brain Research 233: 2903-2912.
Buchsbaum, D., T. L. Griffiths, D. Plunkett, A. Gopnik, and D. Baldwin. 2015. Inferring Action Structure and Causal Relationships in Continuous Sequences of Human Action. Cognitive Psychology 76 (February): 30–77. DOI: 10.1016/j.cogpsych.2014.10.001.
Chiel, H. J., and R. D. Beer. 1997. The Brain Has a Body: Adaptive Behavior Emerges from Interactions of Nervous System, Body and Environment. Trends in Neurosciences 20(12): 553–557. DOI: 10.1016/S0166-2236(97)01149-1.
Coolidge, F. L., and T. Wynn. 2005. Working Memory, Its Executive Functions, and the Emergence of Modern Thinking. Cambridge Archaeological Journal 15(1): 5–26. DOI: 10.1017/S0959774305000016.
Cresswell, R. 2010. Techniques et culture : les bases d’un programme de travail. Techniques and Culture 54–55: 20–45.
Dibble, H. L. 1997. Platform variability and flake morphology: a comparison of experimental and archaeological data and implications for interpreting prehistoric lithic technological strategies. Lithic Technology 22: 150-170.
Dibble, H. L., and A. Pelcin. 1995. The effect of hammer mass and velocity on flakemass. Journal of Archaeological Science 22: 429-439.
Dietrich, G. 2016. Déterminants biomécaniques du tour pivot. Lecture at the International Seminar “Vers une actualisation de l’analyse qualitative du movement”. Departement of Dance. Montreal: UQAM.
Doebel, S.. 2020. Rethinking Executive Function and Its Development. Perspectives on Psychological Science 15(4): 942–956. DOI: 10.1177/1745691620904771.
Endress, A. D., and J. N. Wood. 2011. From Movements to Actions: Two Mechanisms for Learning Action Sequences. Cognitive Psychology 63(3): 141–171. DOI: 10.1016/j.cogpsych.2011.07.001.
Gandon, E., R. J. Bootsma, J. A. Endler, and L. Grosman. 2013. How can ten fingers shape a pot? Evidence for equivalent function in culturally distinct motor skills. PLOS One 8(11).
Gandon E., R. Casanova, and R.J. Bootsma. 2016. Tournage et force centrifuge. In Des céramiques et des hommes : décoder les assemblages archéologiques, ed. by V. Roux, pp. 106-113. Paris: Presses Universitaires.
Gibson, J. J. 1979. The Ecological Approach to Visual Perception. Hillsdale: Lawrence Erlbaum Associates.
Heft, H. 2001. Ecological Psychology in Context: James Gibson, Roger Barker, and the Legacy of William James’s Radical Empiricism. Resources for Ecological Psychology. New York: Psychology Press.
Higgins, S. 1985. Movement as an Emergent Form: Its Structural Limits. Human Movement Science 4(2): 119–148. DOI: 10.1016/0167-9457(85)90007-7.
Hogan, N. 1985. The mechanics of multi-joint posture and movement control. Biological Cybernetics 52: 315–331. DOI: 10.1007/BF00355754.
Inizan, M. L., M. Reduron-Ballinger, H. Roche, and J. Tixier. 1999. Technology and Terminology of Knapped Stone. Nanterre : CREP.
Jäncke, L. 2006. The motor representation in pianists and string players. In Music, motor control and the brain, ed. by E. Altenmuller, M. Wiesendanger, and J. Kesselring, pp. 153–172. Oxford: Oxford University Press.
Järvilehto, T. 1998. The Theory of the Organism-Environment System: I. Description of the Theory. Integrative Physiological and Behavioral Science 33(4): 321–134.
Järvilehto, T. 2006. What Is Motor Learning? In Promotion of Motor Skills in Sports and Physical Education, ed. by K. Thomson, T. Jaakkola, and J. Liukkonen. Jyväskylä: University of Jyväskylä.
Johnson-Frey, S. H. 2004. The Neural Bases of Complex Tool Use in Humans. Trends in Cognitive Sciences 8(2): 71–78. DOI: 10.1016/j.tics.2003.12.002.
Johnson-Frey, S. H., R. Newman-Norlund, and S. T. Grafton. 2005. A Distributed Left Hemisphere Network Active During Planning of Everyday Tool Use Skills. Cerebral Cortex 15(6): 681–695. DOI: 10.1093/cercor/bhh169.
Krakauer, J. W., A. A. Ghazanfar, A. Gomez-Marin, M. A. MacIver, and D. Poeppel. 2017. Neuroscience Needs Behavior: Correcting a Reductionist Bias. Neuron 93(3): 480–490. DOI: 10.1016/j.neuron.2016.12.041.
Kunde, W. 2001. Exploring the Hyphen in Ideo-Motor Action. Behavioral and Brain Sciences 24(5): 891–892. DOI: 10.1017/S0140525X01340104.
Latash, M. L. 2012. The Bliss (Not the Problem) of Motor Abundance (Not Redundancy). Experimental Brain Research 217(1): 1–5. DOI: 10.1007/s00221-012-3000-4.
Laws, K. L. 1979. An analysis of turns in dance. Dance Research Journal 11(1–2): 12–19.
Lemonnier, P. 1986. The Study of Material Culture Today: Toward an Anthropology of Technical Systems. Journal of Anthropological Archaeology 5(2): 147–86. DOI: 10.1016/0278-4165(86)90012-7.
Leroi-Gourhan, A. 1964. Le Geste et La Parole: Technique et Langage. Technique et Langage. Paris: Albin Michel.
Li L., S.C. Lin, S.P. McPherron, A. Abdolahzadeh, A. Chan, T. Dogandžić, R. Iovita, et al. 2022. A Synthesis of the Dibble et al. Controlled Experiments into the Mechanics of Lithic Production. Journal of Archaeological Method and Theory, November. DOI: 10.1007/s10816-022-09586-2.
Malafouris L. 2021. How does thinking relate to tool making? Adaptive Behavior 29(2):107–121. DOI:10.1177/1059712320950539.
Mace, W. 1977. James J.. Gibson’s Strategy for Percieving: Ask Not What’s in Your Head, but What Your Head’s inside Of. In Perceiving, Actiong and Knowing. Toward an Ecological Psychology, ed. by R. Shaw and J. Bransford. Hillsdale: Lawrence Erlbaum Associates.
Marchand, T. 2010. Embodied Cognition and Communication: Studies with British Fine Woodworkers. Journal of the Royal Anthropological Institute 16: S101–S120.
Newell, K. M. 1986. Constraints on the Development of Coordination. In Motor Development in Children: Aspects of Coordination and Control, ed. by M. G. Wade and H. T. A Whiting, pp. 341–60. Dordrecht: Martinus Nijhoff.
Newell, K. M. 1996. Change in Movement and Skill: Learning, Retention, and Transfer. In Dexterity and Its Development, ed. by M. L. Latash and M. T. Turvey, pp. 393–429. New Jersey: IEA.
Nonaka, T., and B. Bril. 2012. Nesting of Asymmetric Functions in Skilled Bimanual Action: Dynamics of Hammering Behavior of Bead Craftsmen. Human Movement Science 31(1): 55–77. DOI: 10.1016/j.humov.2010.08.013.
Nonaka, T., and B. Bril. 2014. Fractal Dynamics in Dexterous Tool Use: The Case of Hammering Behavior of Bead Craftsmen. Journal of Experimental Psychology: Human Perception and Performance 40(1): 218–231. DOI: 10.1037/a0033277.
Nonaka, T., B. Bril, and R. Rein. 2010. How Do Stone Knappers Predict and Control the Outcome of Flaking? Implications for Understanding Early Stone Tool Technology. Journal of Human Evolution 59(2): 155–167. DOI: 10.1016/j.jhevol.2010.04.006.
Orban, G. A., and F. Caruana. 2014. The Neural Basis of Human Tool Use. Frontiers in Psychology 5: 310. DOI: 10.3389/fpsyg.2014.00310.
Pacherie, E. 2018. Motor Intentionality. In The Oxford Handbook of 4E Cognition, ed. by A. Newen, L. De Bruin, and S. Gallagher, pp. 368–88. Oxford University Press. DOI: 10.1093/oxfordhb/9780198735410.013.19.
Pargeter, J., N. Khreisheh, and D. Stout. 2019. Understanding Stone Tool-Making Skill Acquisition: Experimental Methods and Evolutionary Implications. Journal of Human Evolution 133: 146–66.
Pargeter J., N. Khreisheh, J.J. Shea, and D. Stout. 2020. Knowledge vs. know-how? Dissecting the foundations of stone knapping skill. Journal of Human Evolution 145: 102807.
Parry, R., G. Dietrich, and B. Bril. 2014. Tool Use Ability Depends on Understanding of Functional Dynamics and Not Specific Joint Contribution Profiles. Frontiers in Psychology 5: 306. DOI: 10.3389/fpsyg.2014.00306.
Pastra, K., and Y. Aloimonos. 2012. The Minimalist Grammar of Action. Philosophical Transactions of the Royal Society of London. Series B, Biological Sciences 367(1585): 103–117. DOI: 10.1098/rstb.2011.0123.
Pelegrin J. 1991. Les savoir-faire : une très longue histoire. Terrain. Anthropologie & sciences humaines 16: 106–113.
Pelegrin, J. 2005. Remarks about Archaeological Techniques and Methods of Knapping: Elements of a Cognitive Approach to Stone Knapping. In Stone Knapping: The Necessary Conditions for a Uniquely Homini Behaviour, ed. by V. Roux and B. Bril, pp. 23–33. Cambridge: McDonald Press.
Putt, S. S., S. Wijeakumar, R. G. Franciscus, J. P. Spencer. 2017. The Functional Brain Networks That Underlie Early Stone Age Tool Manufacture. Nature Human Behaviour 1(6): 1–8. DOI: 10.1038/s41562-017-0102.
Rasamimanana, N. 2008. Geste instrumental du violoniste en situation de jeu: analyse et modélisation. Doctoral thesis, Paris: Université Pierre et Marie Curie.
Ramayya, A. G., M. F. Glasser, J.S. K. Rilling. 2010. A DTI Investigation of Neural Substrates Supporting Tool Use. Cerebral Cortex 20(3): 507–516. DOI: 10.1093/cercor/bhp141.
Reed, E. S. 1988. Applying the Theory of Action Systems to the Study of Motor Skills. In Complex Movement Behaviour ‘The’ Motor-Action Controversy, ed. by O. Meijer and K. Roth, pp. 45–86. Advances in Psychology. Amsterdam: North Holland.
Reed, E. S. 1996. Encountering the World: Toward an Ecological Psychology. Oxford: Oxford University Press.
Reed, E. S, and B. Bril. 1996. The Primacy of Action in Development. In Dexterity and Its Development, ed. by M. L. Latash and M. T. Turvey, pp. 431–51. Mahwah: Lawrence Erlbaum Associates.
Rein, R. B. Bril, and T. Nonaka. 2013. Coordination Strategies Used in Stone Knapping: Coordination Strategies Used in Stone Knapping. American Journal of Physical Anthropology 150(4): 539–550. DOI: 10.1002/ajpa.22224.
Rein, R., T. Nonaka, and B. Bril. 2014. Movement Pattern Variability in Stone Knapping: Implications for the Development of Percussive Traditions. PLoS ONE 9(11): e113567. DOI: 10.1371/journal.pone.0113567.
Renshaw, I., and K. Davids. 2014. Task Constraints. In Encyclopedia of Sport and Exercise Psychology, ed. by R. Eklund and G. Tenenbaum, pp. 734–737. Los Angeles: SAGE Publications.
Roux, V. 2000. Les Perles de Cambay – Des Pratiques Techniques Aux Techno-Systèmes de l’Orient Ancien. Paris: Editions de la Maison des sciences de l’homme.
Roux, V., and E. David. 2005. Planning Abilities as a Dynamic Perceptual-Motor Skill: An Actualist Study of Different Levels of Expertise Involved in Stone Knapping. In Stone Knapping: The Necessary Conditions for a Uniquely Hominin Behavior, ed. by V. Roux and B. Bril, pp. 91–108. Cambridge: McDonald Press.
Roux, V., B. Bril, and G. Dietrich. 1995. Skills and Learning Difficulties Involved in Stone Knapping: The Case of Stone Bead Knapping in Khambhat, India. World Archeology 27(1): 63–87.
Scholz, J. P., and G. Schöner. 1999. The Uncontrolled Manifold Concept: Identifying Control Variables for a Functional Task. Experimental Brain Research 126(3): 289–306. DOI: 10.1007/s002210050738.
Shim, K. E. 2016. L’assimilation du tour-pivot en danse classique la Pirouette en dehors par la danse coréenne Hanbaldeuleodolgi. Doctoral thesis. Paris: EHESS.
Shockley, K., M. Butwill, J.P. Zbilut, and C.L. Jr. Webber. 2002. Cross recurrence quantification of coupled oscillators. Physics Letters A 305: 59-69.
Smitsman, A. W. 1997. The Development of Tool Use: Changing Boundaries between Organism and Environment. In Evolving Explanations of Development: Ecological Approaches to Organism–Environment Systems, ed. by C. Dent-Read and P. Zukow-Golring, pp. 301–329. American Psychological Association. DOI: 10.1037/10265-008.
St Amant, R., and T. E. Horton. 2008. Revisiting the Definition of Animal Tool Use. Animal Behaviour 75(4): 1199–1208. DOI: 10.1016/j.anbehav.2007.09.028.
Stout, D., and T. Chaminade. 2012. Stone Tools, Language and the Brain in Human Evolution. Philosophical Transactions of the Royal Society of London. Series B, Biological Sciences 367(1585): 75–87. DOI: 10.1098/rstb.2011.0099.
Stout, D., and N. Khreisheh. 2015. Skill Learning and Human Brain Evolution: An Experimental Approach. Cambridge Archaeological Journal 25(4): 867–875. DOI: 10.1017/S0959774315000359.
Summers, J. J., and J. G. Anson. 2009. Current Status of the Motor Program: Revisited. Human Movement Science 28(5): 566–577. DOI: 10.1016/j.humov.2009.01.002.
Thelen, E., and L. B. Smith. 1996. A Dynamic Systems Approach to the Development of Cognition and Action. MIT Press.
Uomini-Thaïs, N., and G. F. Meyer. 2013. Shared Brain Lateralization Patterns in Language and Acheulean Stone Tool Production: A Functional Transcranial Doppler Ultrasound Study. Edited by Michael D. Petraglia. PLoS ONE 8(8): e72693. DOI: 10.1371/journal.pone.0072693.
van Elk, M., H. van Schie, and H. Bekkering. 2014. Action Semantics: A Unifying Conceptual Framework for the Selective Use of Multimodal and Modality-Specific Object Knowledge. Physics of Life Reviews 11(2): 220–250. DOI: 10.1016/j.plrev.2013.11.005.
Warren, W. H. 2006. The Dynamics of Perception and Action. Psychological Review 113(2): 358–389. DOI: 10.1037/0033-295X.113.2.358.
Wynn, T., and F. L. Coolidge. 2004. The Expert Neandertal Mind. Journal of Human Evolution 46(4): 467–487. DOI: 10.1016/j.jhevol.2004.01.005.
Wynn, T., M. Haidle, M. Lombard, and F. L. Coolidge. 2017. The expert cognition model in human evolutionary studies. In Cognitive Models in Palaeolithic Archaeology, ed. by T. Wynn and F.L. Coolidge. Oxford – New York: Oxford University Press.